Основные разделы
Основные разделы
Разделы
Автоматизация технологических процессов отрасли - Контрольная работа №3 Вариант №4
Куплен: 0 раз
650 ₽
Добавил: BlackAdmin
ВУЗ: вгту
Описание
Теоретическое задание.Вопрос 1. Контроль натяжения нитей.
Вопрос 2. САР прессов ВТО.
Практическое задание.
Задача №1
В соответствии с заданным вариантом, рассчитать динамические метры гидравлической емкости. Исходными данными являются:
1) площадь поперечного сечения емкости S, м2;
2) в начальный момент (установившийся режим) приток жидкости Q1 в емкость равен стоку Q2; Q1=Q2= Q0, л/с;
3) начальный уровень жидкости Н0, м;
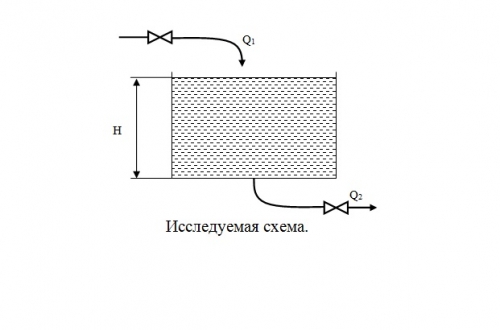
4) возмущением является изменение притока на величину μ0, вызванного резким открытием вентиля притока;
5) сток происходит через отверстие, расположенное в дне емкости;
6) форма емкости цилиндрическая.
Построить переходную характеристику объекта и показать на ней динамические параметры. Записать уравнение динамики.
Задача №2
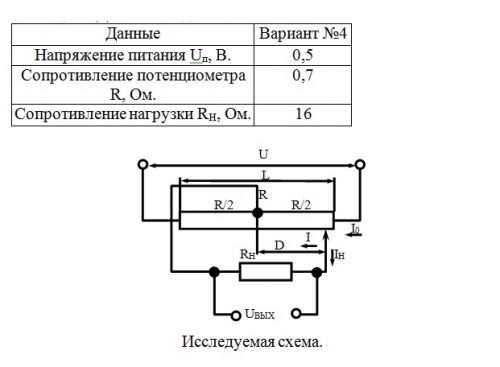
Дана потенциометрическая схема включения реостатного датчика с подключением сопротивления нагрузки между средней точкой потенциометра и движком потенциометра (рисунок ). Данные для расчета приведены в таблице.
Необходимо:
1. Определить при изменении относительного перемещения движка реохорда от -0,5 до +0,5 с интервалом 0,1: ток нагрузки Iн, выходное напряжение потенциометра Uвых при Rн=∞, выходное напряжение Uвых на нагрузке, мощность выходного сигнала Р, абсолютную ΔU и относительную δU погрешности нагруженного потенциометра.
2. Определить абсолютную и относительную погрешности при увеличении сопротивления нагрузки в десять раз и относительном перемещении движка реохорда 0,
5. Сравнить результаты с расчетами по заданному значению сопротивления в той же точке и сделать выводы.
3. Построить следующие характеристики потенциометра:
— статическая характеристика при холостом ходе (Rн=∞) Uвых=f(X);
— статическая характеристика при заданной нагрузке Uвых=f(X);
— крутизну характеристики K=f(X);
— относительную погрешность U=f(X);
— результаты расчетов свести в таблицу.
(X — относительное перемещение)
Задача №3
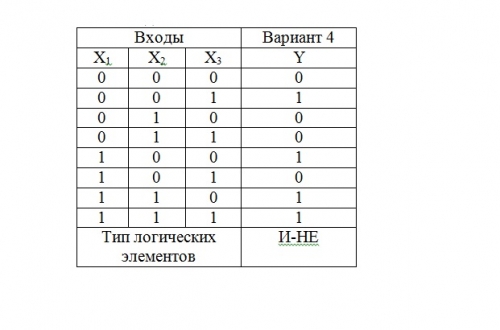
Разработать логическую схему управления по таблице истинности. Записать логическую функцию, минимизировать с помощью законов алгебры логики. Реализовать на релейно-контактной аппаратуре и бесконтактных логических элементах.
Задача №4
Разработать схему управления многодвигательной системой приводов как функцию времени. Система состоит из трех асинхронных двигателей.
При разработке предусмотреть:
1) систему защиты схемы управления и схем подключения двигателей по току и по температуре;
2) в схемах подключения фаз двигателей к питанию использовать по одной контактной группе, не допуская усложнения схем коммутации двигателей;
3) в схемах защиты можно использовать автоматические выключатели;
4) провести выбор аппаратуры управления и защиты [4,5,6] (длительности тактов принять из расчета 2*номер варианта *номер такта).
Задача №5
Разработать схему управления многодвигательной системой приводов конвейерного транспорта в двух исполнениях:
— с использованием слаботочных реле;
— с использованием логических элементов.
В качестве задающего сигнала использовать кнопочные станции без фиксации. Изобразить разработанные схемы с обозначением элементов по правилам изображения принципиальных электрических схем.
Список использованных источников






 prepodvshoke@gmail.com
prepodvshoke@gmail.com blackadmins
blackadmins




0 комментариев